Topics Covered
Lesson Links
Enhancement!
Your own conversion
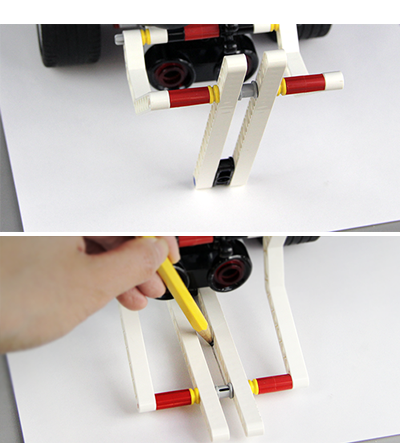
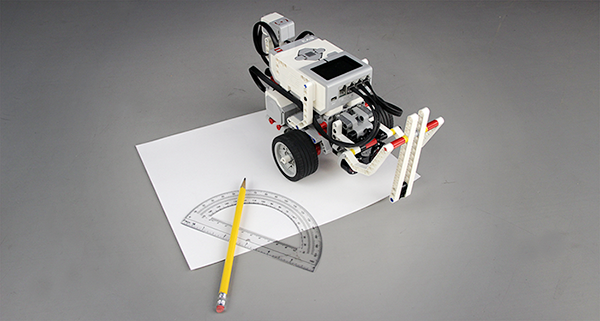 The .459 conversion rate we used is for the robot in the video,
and may not match your robot very well.
It would be much better to find a correct value for your robot.
The .459 conversion rate we used is for the robot in the video,
and may not match your robot very well.
It would be much better to find a correct value for your robot.