Mini Challenge 1: Obstacle Detecting Move Until Black Line
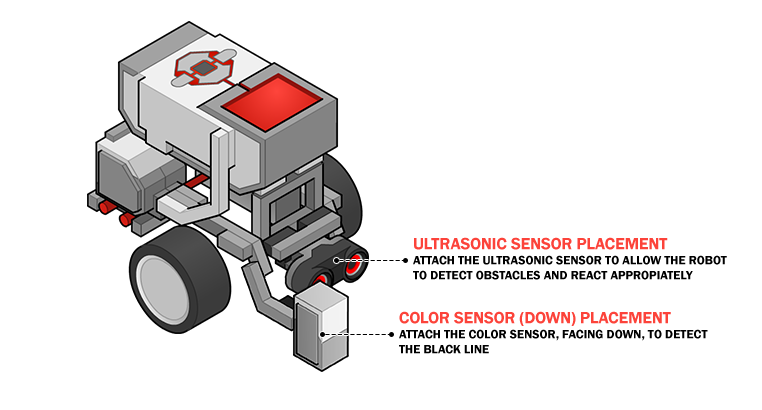
Modify the Obstacle Detection program you wrote so that it will move safely (stopping when an obstacle is in front of it, moving when there is none) until the Color Sensor detects a black line on the table, rather than until the robot has traveled a certain number of rotations.


There is a Sensor set in the Switch, and one set in the Loop. Which one controls the "end of behavior"?