- :-
Topics Covered
Switch Loops
Lesson Links
- 1. Why doesn't this program work for Obstacle Detection?
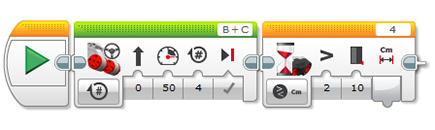
-
- 2. Why doesn't this program work for Obstacle Detection?
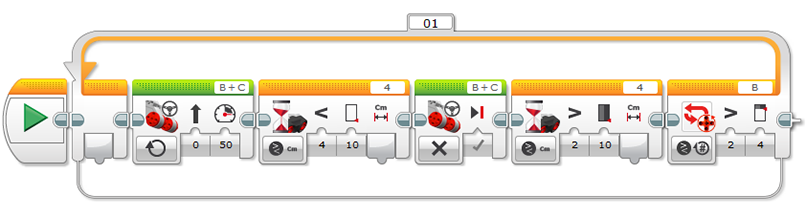
-
- 3. Instead of using Waiting approach and long movements, the solution you will learn next will involve:
-