Other Sensors
Set the Loop's mode to Touch Sensor instead of Ultrasonic Sensor. Make sure there is a Touch Sensor on the robot. Run the program and try to get the robot to stop!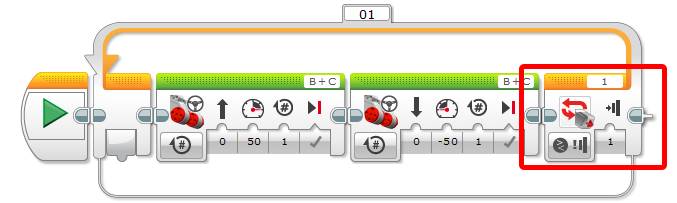
|
The robot will check the Touch Sensor instead of the Ultrasonic Sensor at the end of the Loop to see whether it will send Flow back or leave the Loop. If the Touch Sensor is being pressed in at the time the Loop ends, the robot will stop! If not it will start moving again. |
Mini Challenge 1: Square Lap 3
Make your robot run laps around the box until it encounters an obstacle in its way. The obstacle will be placed so that it is visible to the robot immediately after it turns.