Move Steering Block
On
Turns in place to the right at 50% power. No stopping condition.
Turn on the motors so the robot turns in place to the right.
Wait Block
Gyro Sensor - Change - Angle
Stops the program flow until the value from the gyro sensor is greater than '80'
Robot waits until the robot's body has turned more than 80 degrees.
Move Steering Block
Off
Turns Motors B+C Off, and sets them to a Braking state.
Stops the robot. Note that the program can only reach this block after the "Wait for Gyro" block finishes.
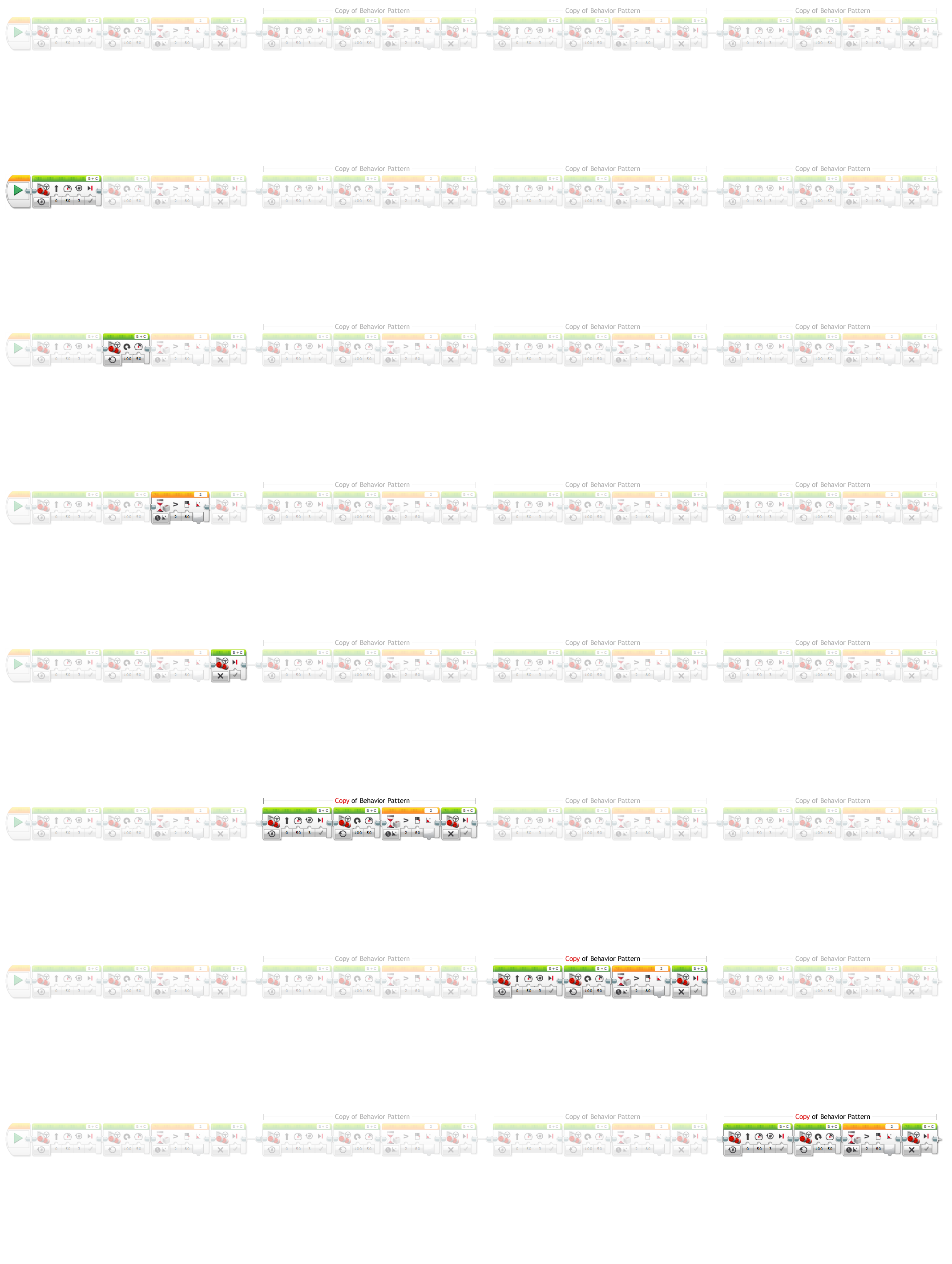
Move Steering Block
On for Rotations
Moves the robot forward 3 wheel rotations at 50% power.
Moves forward.
Move Steering Block
On
Turns in place to the right at 50% power. No stopping condition.
Turn on the motors so the robot turns in place to the right.
Wait Block
Gyro Sensor - Change - Angle
Stops the program flow until the value from the gyro sensor is greater than '80'
Robot waits until the robot's body has turned more than 80 degrees.
Move Steering Block
Off
Turns Motors B+C Off, and sets them to a Braking state.
Stops the robot. Note that the program can only reach this block after the "Wait for Gyro" block finishes.
Move Forward, then Turn 90 degrees to the Right
Copy of the behavior pattern used earlier in the program.
Robot moves foward for 3 rotations. Then turns 90 degrees to the right using the gyro sensor.
Move Forward, then Turn 90 degrees to the Right
Copy of the behavior pattern used earlier in the program.
Robot moves foward for 3 rotations. Then turns 90 degrees to the right using the gyro sensor.
Move Forward, then Turn 90 degrees to the Right
Copy of the behavior pattern used earlier in the program.
Robot moves foward for 3 rotations. Then turns 90 degrees to the right using the gyro sensor.