Left Turns
Does the same Wait for Gyro block work for left turns?
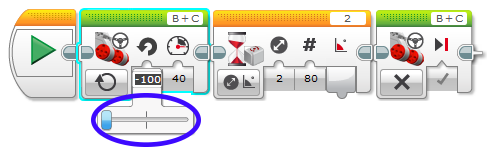
Try changing your program to turn 90 degrees to the left instead.
What happens?
|
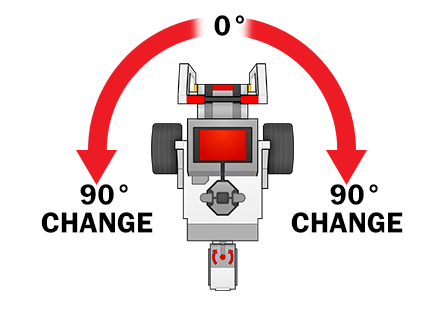
The same block works for both left and right turns, because the Wait Block is set to wait for any 90-degree change in the Gyro Sensor's reading. A 90-degree turn causes a 90-degree CHANGE in direction, regardless of whether the turn is to the left or right. |
Mini Challenge 1: Square Box
Program and make the robot complete a full lap around a square box, using the Gyro Sensor to control all of its turns.
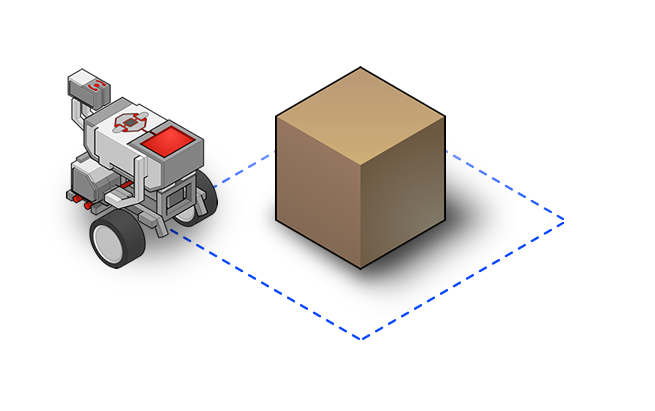
Find the width and length of the box to help with straight movements.
Turn at the corners of the box.
Pause for a couple of seconds after commands for consistency.
Did you know?
How the Gyro Sensor Works|
The EV3 Gyro Sensor is a MEMS Sensor (Micro-ElectroMechanical System) |