Wait Block
Touch Sensor - Compare - State
Stops the program from processing additional commands until the Touch Sensor value is '1' (Pressed)
Robot waits until the Touch Sensor is pressed before continuing the program.
Move Steering Block
On for Rotations
Moves the robot forward. Note that the program can only reach this block after the "Wait for Touch" block finishes.
Moves forward (after Wait Block finishes)

Move Steering Block
On
Turns Motors B+C On at 50% Power
Starts moving the robot forward. Another Move or Motor command will need to stop them later.
Wait Block
Touch Sensor - Compare - State
Stops the program from processing additional commands until the Touch Sensor value is '1' (Pressed)
Robot waits until the Touch Sensor is pressed before continuing the program.
Move Steering Block
Off
Turns Motors B+C Off, and sets them to a Braking state
Stops the robot. Note that the program can only reach this block after the "Wait for Touch" block finishes.
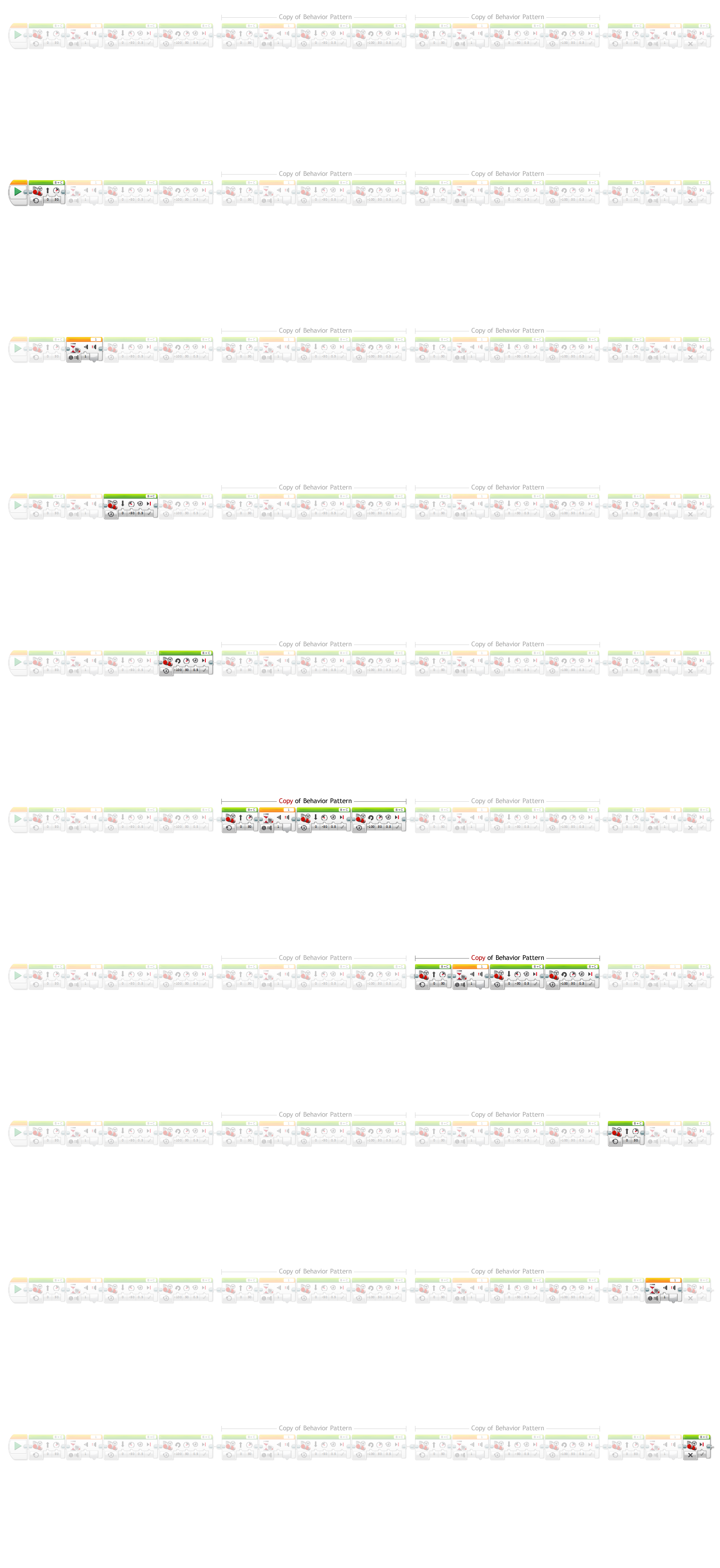
Move Steering Block
On
Turns Motors B+C On at 50% power
Starts moving the robot forward. Another Move or Motor command will need to stop them later.
Wait Block
Touch Sensor - Compare - State
Stops the program from processing additional commands until the Touch Sensor value is '1' (Pressed)
Robot waits until the Touch Sensor is pressed before continuing the program.
Move Steering Block
On for Rotations
Moves the robot backward 0.5 rotations at 50% power.
Backs up from the wall. Note that the program can only reach this block after the "Wait for Touch" block finishes.
Move Steering Block
On for Rotations
Turns in place to the left, for 0.5 rotations (approx. 90 degrees) at 50% power.
Turns 90 degrees to the left.
Forward until Touch, then Back Up, then Turn Left
Copy of the behavior pattern used earlier in the program
Robot moves forward until it touches the wall, then backs up a little, and turns 90 degrees to the left.
Forward until Touch, then Back Up, then Turn Left
Copy of the behavior pattern used earlier in the program
Robot moves forward until it touches the wall, then backs up a little, and turns 90 degrees to the left.
Move Steering Block
On
Moves the robot forward at 50% power. No stopping condition.
Start the motors on to move forward.
Wait Block
Touch Sensor - Compare - State
Stops the program from processing additional commands until the Touch Sensor value is '1' (Pressed)
Robot waits until the Touch Sensor is pressed before continuing the program.
Move Steering Block
Off
Stops both motors of the robot.
Stops the robot (after Wait Block finishes)