Mini Challenge 1: Dizzy Drill
Program your robot to run out to an obstacle, go around it, then come back.
Use a small object as an obstacle, and program your robot to travel around it.
The robot may start and finish in any postion behind the start line.
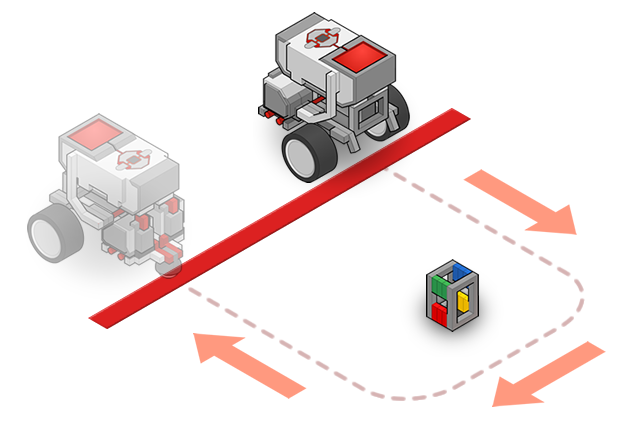
You may use any kind of turn you want to complete this maneuver.
Different Motions
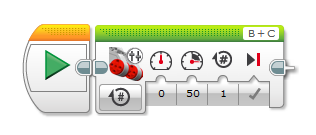
You can create many different type of motion by combining different motor speeds.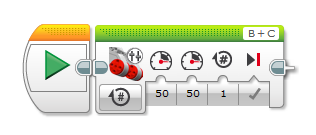
|
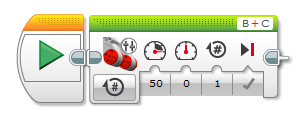
The robot moves straight forward (at 50% power) until the wheels have completed 1 rotation. |
|
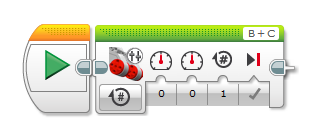
The robot makes a "wide" turn to the left until the moving wheel completes 1 rotation. |
|
The robot brakes to hold in place. Note that because it has been told to keep doing this "for 1 rotation", it will never complete the action (it's braking, so it can't complete 1 rotation) |
|
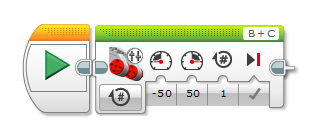
The robot turns in place, spinning to the left until the wheels have completed 1 rotation. |
|
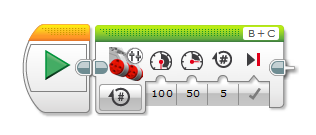
The robot makes a curved movement, forward and to the right, until its wheels have completed 5 rotations. |